Teaching Drones to Fly Through Air Ducts

A new article published in npj Robotics addresses the challenge of flying small quadcopters in ventilation ducts with a maximum diameter of 35 cm. This research, conducted by a team of researchers from Inria, CNRS, the University of Lorraine, and Aix-Marseille University, opens up a new field of possibilities relating to the accessibility and inspection of confined environments.
Air Ducts: A Contemporary Challenge for Safety Inspections
Although ubiquitous in modern buildings and underground networks, air ducts remain difficult to inspect due to their inaccessibility. Their narrowness and inability to support a person's weight make essential interventions for maintaining air quality, heating, and air conditioning impossible. Due to their ability to navigate both horizontally and vertically, small quadcopter drones offer a potential solution for exploring these air ducts. However, these drones create airflows that circulate inside the duct and destabilize the drone, creating significant turbulence in an environment that offers little room for error.
Mapping Aerodynamic Forces in a Circular Air Duct
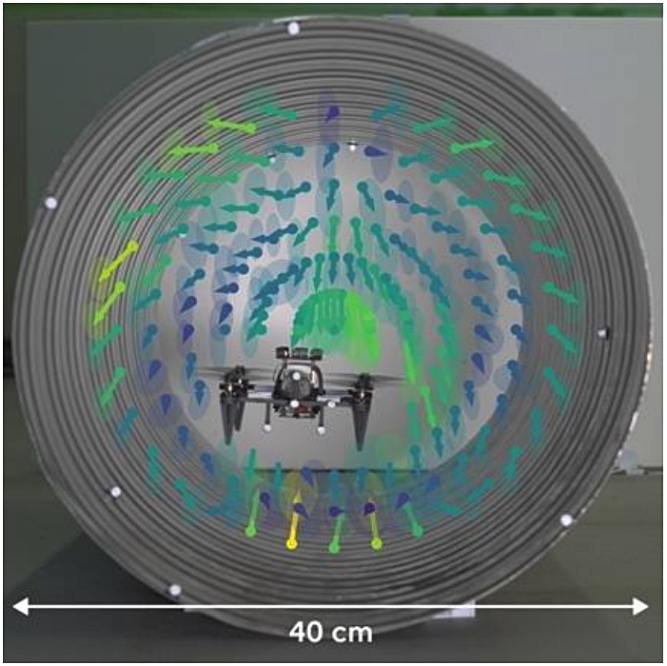
First, the team studied how air flows depending on the drone's position in the duct. To do this, a robotic arm and a force and torque sensor were used to measure forces at hundreds of positions. This initial force "map" highlights a complex aerodynamic pattern and allows the identification of "dangerous" areas in circular ducts, where recirculating currents push the drone toward the walls, and a safer position, where the generated forces cancel each other out.
Flying and Hovering a Small Quadcopter in Small Air Ducts
To maintain its position at the recommended point, the drone must be able to identify its current position in a generally dark environment marked by a lack of visual cues. The research team combined small lasers and artificial intelligence (a neural network trained on motion capture data) to enable the small drone to hover in the area with the least turbulence, allowing it to fly more safely and stably.

A Step Toward New Areas of Application
The results of this research open up promising new areas of application for drones in industrial inspection and public safety. The next step will be to develop a prototype more focused on applications that include payloads such as cameras, thermal imaging cameras, or gas sensors.
A Large-Scale Collaborative Project
This research was conducted by Jean-Baptiste Mouret, Inria research director, and Thomas Martin, doctoral student, both members of the HUCEBOT project team, a joint CNRS, Inria, and University of Lorraine project, within the Inria Center at the University of Lorraine and the Lorraine Laboratory for Research in Computer Science and its Applications (CNRS/University of Lorraine).
This work is the result of a collaboration with the Etienne-Jules Marey Institute of Movement Sciences (Aix-Marseille University/CNRS) and the Design, Manufacturing, and Control Laboratory (University of Lorraine). It reflects the strength of partnerships between French institutions such as Inria, CNRS, University of Lorraine, and Aix-Marseille University.
Top Photo: G. Destombes © Inria
Source: Inria



