Escorting Drone Swarm Formation
Robot swarms provide a robust approach for performing common tasks in which the emergence of collective capabilities outperforms the addition of the individual ones. They are frequently used in surveillance or defence systems where resilience is a must.
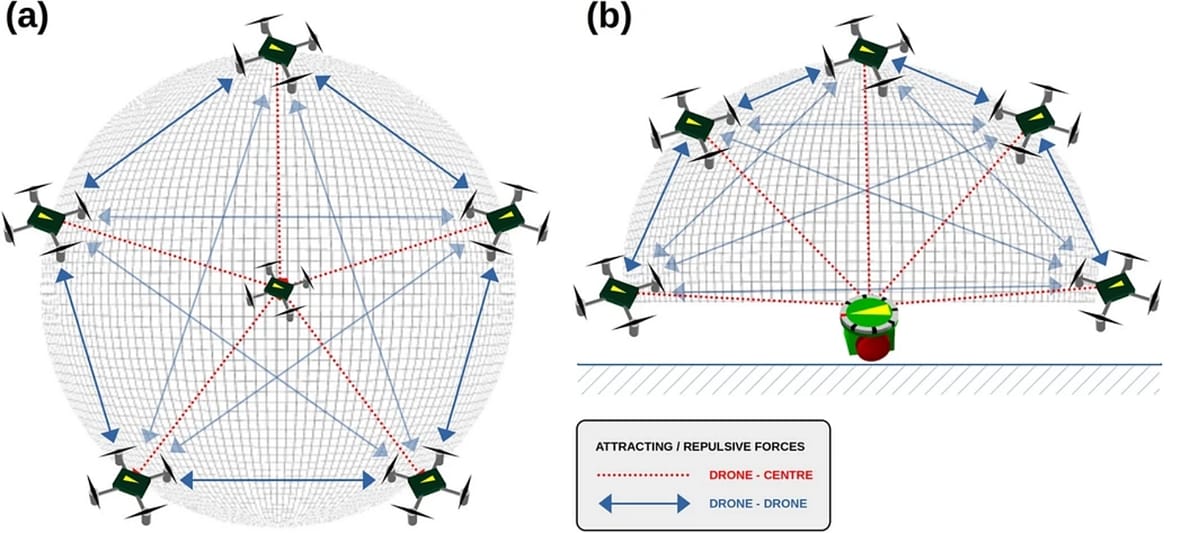
In this article we propose a swarm of drones capable of surrounding and escorting different types of targets such as a rogue drone or a ground vehicle. We use swarm intelligence and evolutionary optimisation to support the swarm self-organisation using a set of optimal parameters.
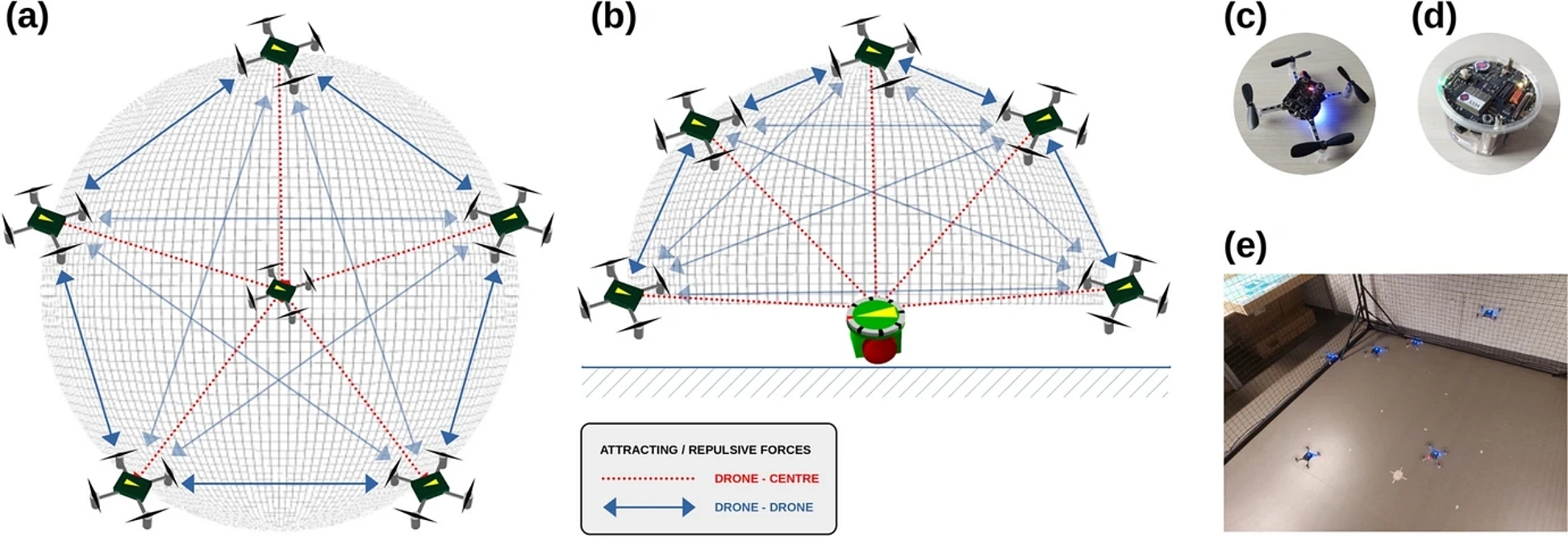
Our experiments were focused on analysing the properties of the swarm of drones as well as assessing its scalability and fault tolerance. We have used computer simulations to test a variety of different initial drone positions and target trajectories. Additionally, we have validated our proposal through experiments using real-world drones.
The achieved results show that our formation system has successfully built stable formations when it was properly configured. It has worked with swarms of five, ten, and twenty drones, and has also been able to recover in the majority of cases in which some drones have failed.
The full paper can be downloaded here.
Source: Springer Nature Link



