Autonomous and Efficient Large-Scale Snow Avalanche Monitoring with an Unmanned Aerial System
Autonomous long-endurance fixed-wing aerial vehicles will become a powerful tool for gathering high-quality data for large-scale environment monitoring applications. This will create more robust, complete and reliable databases, essential for hazard mapping and mitigation measure planning.
As avalanches occur in remote and potentially dangerous locations, data relevant to avalanche monitoring is difficult to obtain. Unmanned fixed-wing aerial vehicles are promising platforms for gathering aerial imagery to map avalanche activity over a large area.
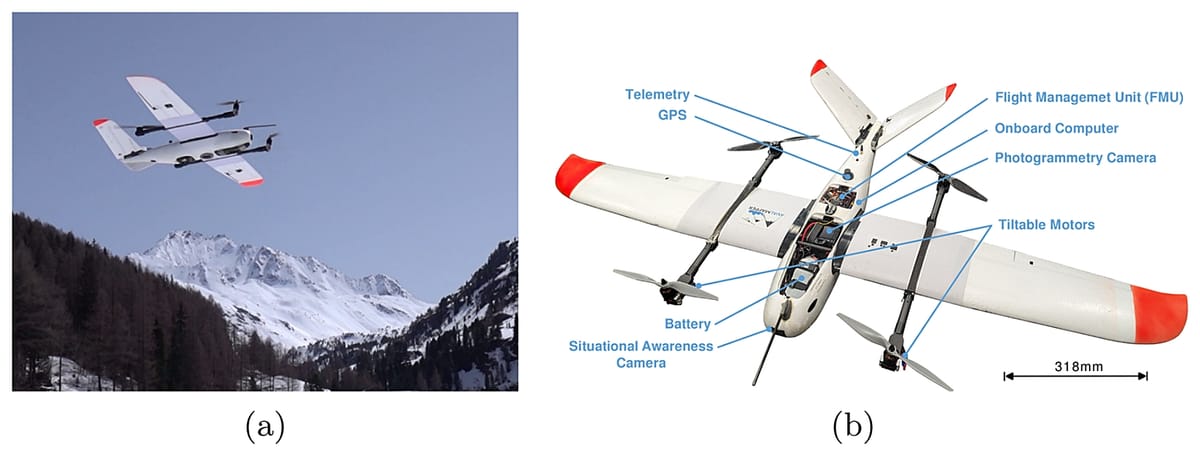
In this work, researchers at the Autonomous Systems Lab, ETH Zürich, Switzerland present an unmanned aerial system (UAS) capable of autonomously navigating and mapping avalanches in steep mountainous terrain, in the hope that their work may enable efficient large-scale autonomous avalanche monitoring.
Abstract
Current and accurate information about the location and extent of released avalanches is critical for public safety and decision-making. However, such data is difficult and expensive to obtain in remote locations. Unmanned fixed-wing aerial vehicles, due to their low cost, long range, and high travel speeds, are promising platforms to gather aerial imagery to map avalanche activity.
However, autonomous flight in mountainous terrain remains a challenge due to the complex topography, regulations, and harsh weather conditions. In this work, we present a proof of concept system that is capable of safely navigating and mapping avalanches using a fixed-wing aerial system (UAS) and discuss the challenges arising for operating such a system.
We show in our field experiments that we can effectively and safely navigate in steep mountain environments while maximizing the map quality and efficiency while meeting regulatory requirements. We expect our work to enable more autonomous operations of fixed-wing vehicles in alpine environments to maximize the quality of the data gathered.
By enabling the acquisition of frequent and high quality information on avalanche activity, such drone systems would have a large impact of safety critical applications such as avalanche warning, mitigation measure planning or hazard mapping.
Conclusions and Outlook
In this paper, we have demonstrated a long-range autonomous fixed-wing sUAS capable of safely navigating and actively mapping a target region of interest in steep mountain terrain, also in winter.
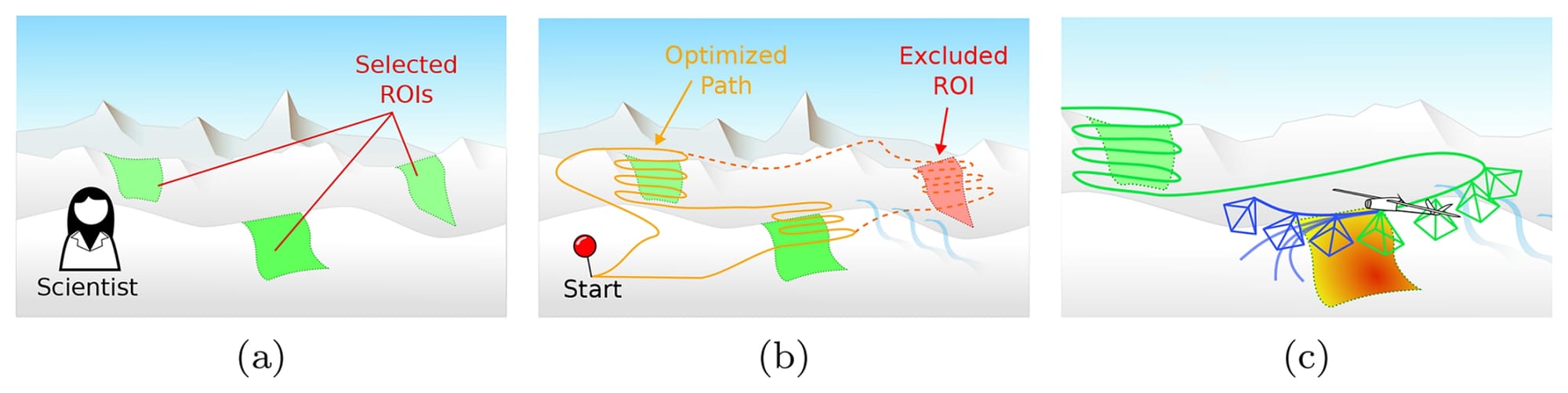
We have demonstrated how a route planning problem can be formulated as an orienteering problem, and how significant the efficiency of a mapping method can have an impact on the number of ROIs that can be visited within a single flight.
Then we demonstrated on a real platform by integrating a safe path planner that safely navigates mountainous environments, considering the terrain and regulation constraints as well as the limited maneuverability of the fixed-wing vehicle.
We also demonstrated an active mapping planner that iteratively plans the next maneuvers to optimize its viewpoints to maximize the information gathered.
The field demonstration has shown that the safe navigation planner is capable of guiding the vehicle to maintain a distance between the maximum and minimum distance constraints, which successfully operate the vehicle in a dynamic manner.
The demonstration has also shown some shortcomings of the approach, including brief violations of the constraints due to the discretization of the elevation map and the large tracking errors of the vehicle.
The field tests have also shown that the active mapping planner is capable of mapping an ROI with good coverage, while staying under the distance constraints.
The full study can be accessed here.



